Proof of Concept Demonstrator
The proof of concept demonstrator work package designs and develops system used on the roadside and in vehicles. It showcases an Infrastructure Sensor to Vehicle solution inline with the project vision of a truly connected transport system. The work package is ultimately delivered in the form of a live demonstrator in the town of Guildford, Surrey with the support of the Guildford Borough Council.
The system demonstrates new detection capabilities and communications standards allowing connected and autonomous vehicles to effectively see both around corners and at a relatively remote distance, addressing line-of-sight limitations of existing V2X systems. The system extends to identify other objects including pedestrians and cyclists.
NO DESCRIPTOR FOR THIS IMAGE
The work package focuses on developing and deploying a sensor network interconnected using the 802.11p vehicle communications standard. Data captured by the sensors are used to create a Local Dynamic Map (LDM) which is visible to drivers through an on-board display. The work package shows the capability of the project team to build a working system in a lab and take it through to deployment and testing in a real world environment.
A total of 13 state of the art road-usage sensors from Vivacity Labs are deployed around a major intersection in Guildford (the Guildford Gyratory). The sensors are mounted above traffic lights and have a view over traffic approaching the intersection. The sensors use computer vision and machine learning to detect and categorise road users in real time and map their positions in real space.
Each sensor is equipped with an 802.11p module developed by Epitomical which broadcasts every detection to all nearby road users with a compatible receiver. The receiver used for the demonstration is an Epitomical OBU furnished with an 802.11p module for communications and an infotainment display. This allows connected vehicles to build a real-time local dynamic map (LDM) of their surroundings and to effectively see around corners giving them a line of sight greater than that achievable with on-board cameras.

Vivacity Sensor
Each sensor can also communicate with other nearby sensors, rebroadcasting appropriately in a mesh-network fashion. This allows the local dynamic map to cover a greater geographical area than would otherwise be possible due to hardware range limitations.
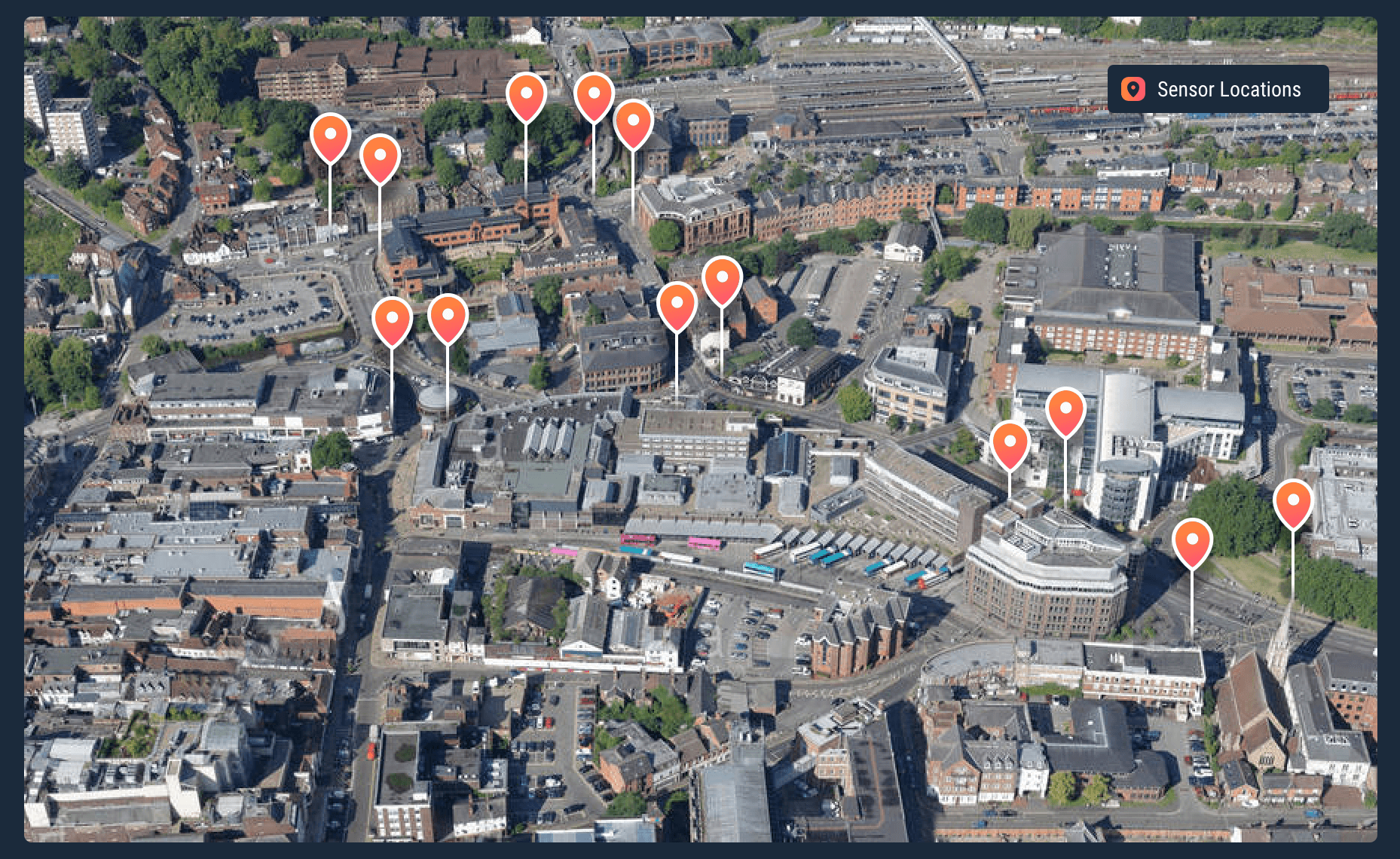
Sensor Deployment in Guildford
All data is anonymised at-source in a privacy-by-design system. The sensors only broadcast abstract metadata of other road user, and no video or images are recorded thereby proactively addressing potential GDPR concerns.
Animation of Sensor Detection and Track Mapping